-
 0
0
-
 0
0
-

 Facebook
FacebookGiới thiệu sản phẩm
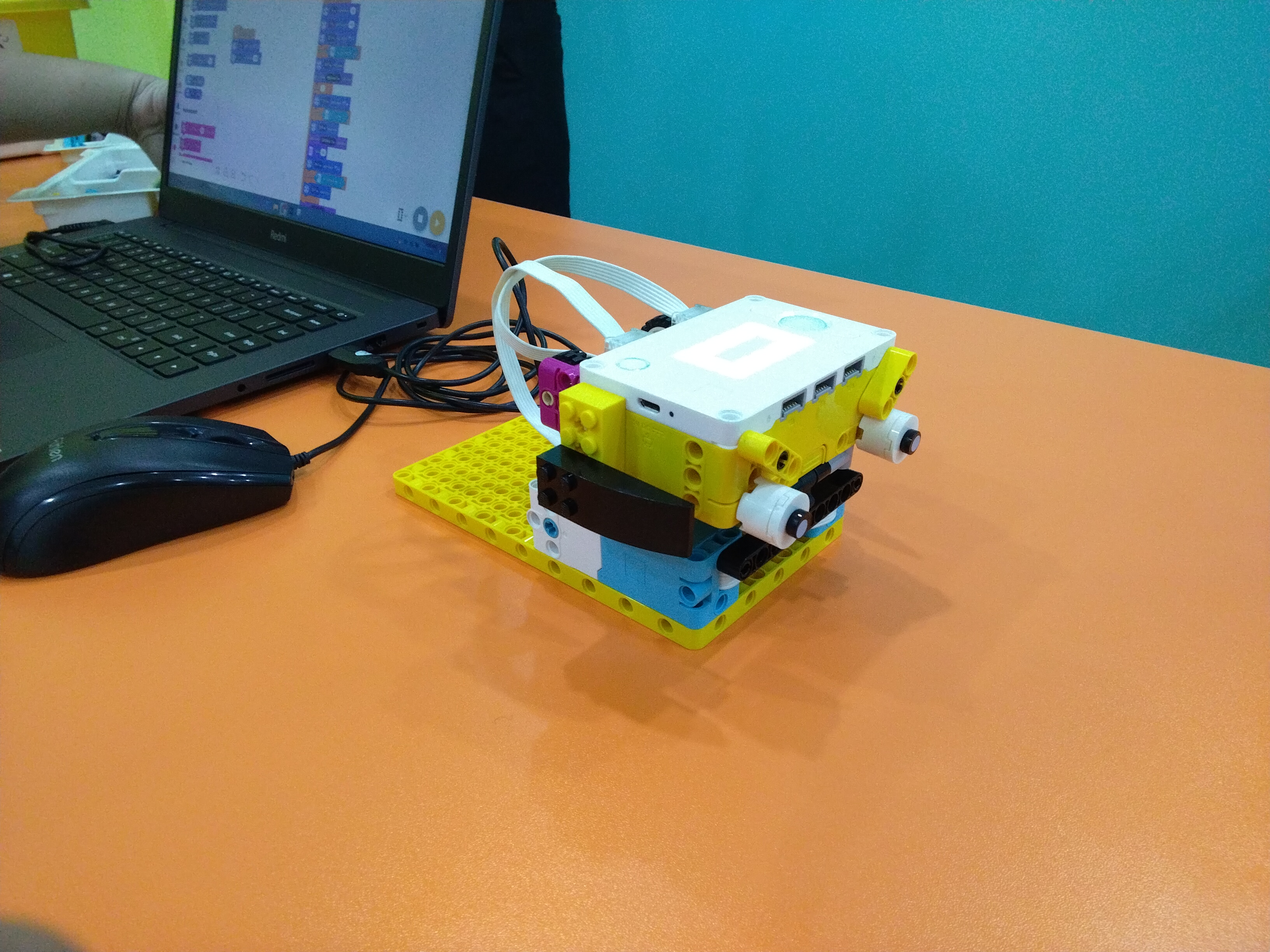
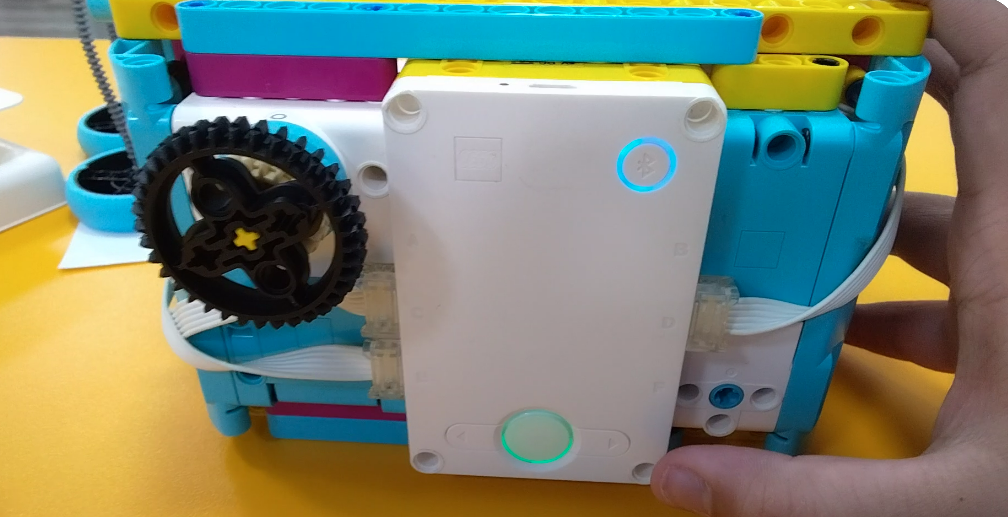
1. Học về phần cứng (Hardware) của SPIKE Prime
- Bộ điều khiển (Hub): Đây là "bộ não" của robot. Học sinh sẽ tìm hiểu cách hoạt động của bộ điều khiển này, bao gồm:
- Các cổng kết nối động cơ và cảm biến.
- Sự khác biệt giữa cổng đầu vào và đầu ra.
- Cách sạc pin, bật/tắt thiết bị.
- Sử dụng ma trận LED trên Hub để hiển thị biểu tượng, chữ cái hoặc số.
- Các cổng kết nối động cơ và cảm biến.
- Động cơ (Motors): Bộ SPIKE Prime thường đi kèm với các loại động cơ cỡ lớn và vừa. Học sinh sẽ học cách điều khiển động cơ để:
- Cho robot di chuyển tiến, lùi với tốc độ và quãng đường cụ thể.
- Quay robot theo các góc chính xác.
- Sử dụng động cơ để điều khiển các cơ cấu chấp hành (end-effector) như kẹp gắp, tay nâng.
- Cho robot di chuyển tiến, lùi với tốc độ và quãng đường cụ thể.
- Cảm biến (Sensors): Đây là "các giác quan" của robot. Học sinh sẽ làm quen và sử dụng hiệu quả các loại cảm biến của SPIKE Prime:
- Cảm biến màu (Color Sensor): Dùng để dò line đen trên sa bàn, nhận biết các màu sắc khác nhau của vật thể, hoặc dừng robot tại một vị trí cụ thể. Đây là cảm biến không thể thiếu trong các cuộc thi sa bàn.
- Cảm biến khoảng cách (Distance Sensor): Dùng để đo khoảng cách tới vật thể, giúp robot tránh chướng ngại vật hoặc dừng lại trước một bức tường.
- Cảm biến lực (Force Sensor): Dùng để phát hiện khi robot chạm vào một vật hoặc khi kẹp gắp đã giữ được vật thể.
- Con quay hồi chuyển (Gyro Sensor) tích hợp trong Hub: Đây là một công cụ cực kỳ quan trọng. Học sinh sẽ sử dụng nó để:
- Giúp robot di chuyển thẳng một cách chính xác hơn.
- Thực hiện các cú quay robot theo đúng góc độ yêu cầu (ví dụ: quay 90 độ, 180 độ).
- Giúp robot di chuyển thẳng một cách chính xác hơn.
- Cảm biến màu (Color Sensor): Dùng để dò line đen trên sa bàn, nhận biết các màu sắc khác nhau của vật thể, hoặc dừng robot tại một vị trí cụ thể. Đây là cảm biến không thể thiếu trong các cuộc thi sa bàn.
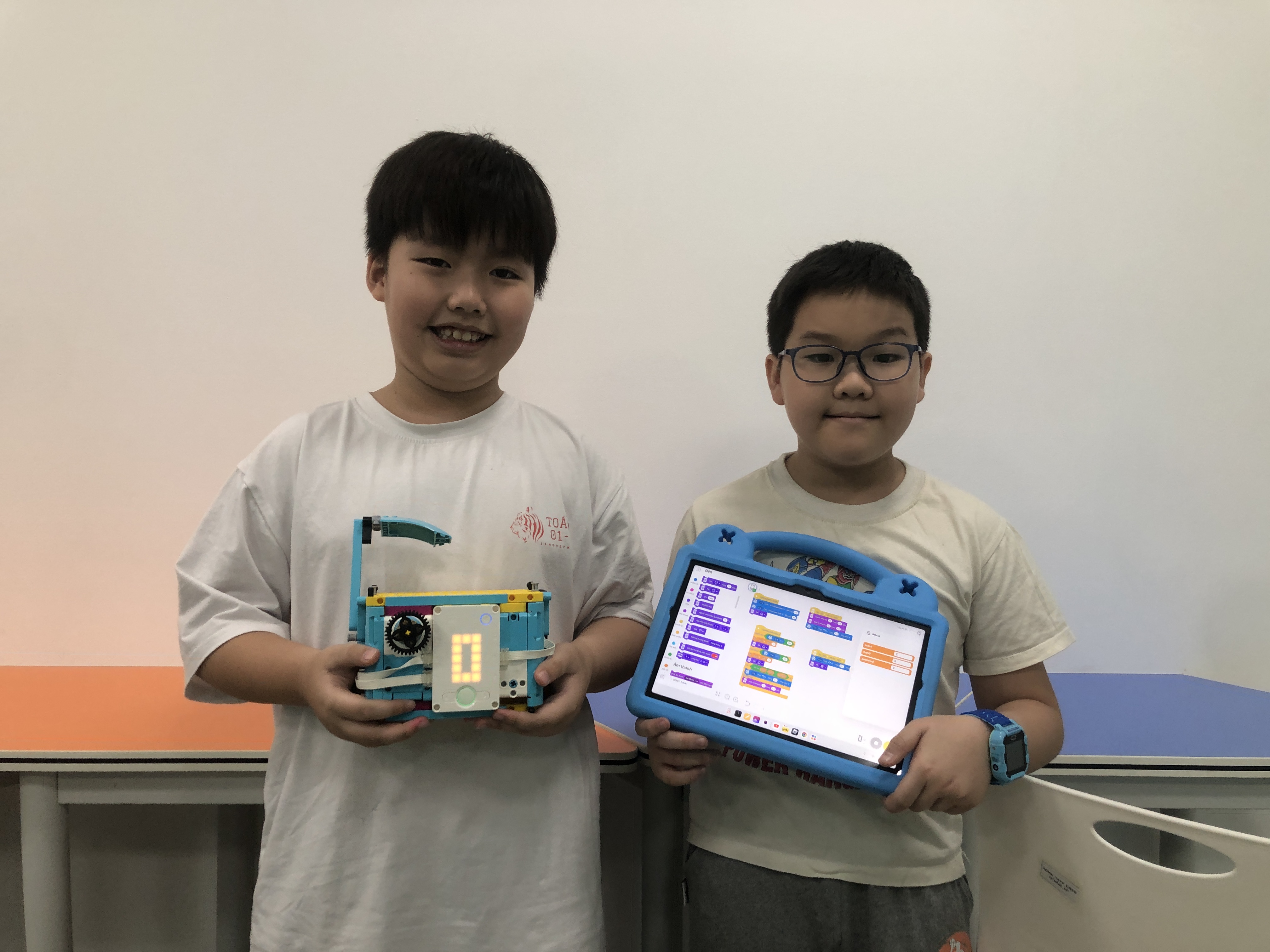
2. Học về lập trình (Software) với môi trường lập trình của SPIKE Prime
- Lập trình khối lệnh (Block-based Programming): Học sinh sẽ bắt đầu với giao diện lập trình trực quan, sử dụng các khối lệnh kéo-thả để xây dựng chương trình. Các em sẽ học được:
- Các khối lệnh cơ bản để điều khiển động cơ: di chuyển tiến/lùi, quay trái/phải, thiết lập tốc độ.
- Các khối lệnh điều khiển cảm biến: đọc giá trị từ cảm biến màu, cảm biến khoảng cách, con quay hồi chuyển.
- Các cấu trúc điều khiển: vòng lặp (loop) để lặp lại một hành động, điều kiện (if-else) để robot đưa ra quyết định dựa trên dữ liệu cảm biến.
- Các khối lệnh cơ bản để điều khiển động cơ: di chuyển tiến/lùi, quay trái/phải, thiết lập tốc độ.

Sản phẩm cùng tác giả
-
 Nhà sáng tạo Vũ Đức Anh 10 tuổiRobot sa bàn
Nhà sáng tạo Vũ Đức Anh 10 tuổiRobot sa bàn -
 Nhà sáng tạo Vũ Đức Anh 10 tuổiB1 WRO 2025
Nhà sáng tạo Vũ Đức Anh 10 tuổiB1 WRO 2025 -
 Nhà sáng tạo Vũ Đức Anh 10 tuổiRobot sa bàn
Nhà sáng tạo Vũ Đức Anh 10 tuổiRobot sa bàn
Sản phẩm liên quan

Nhà sáng tạo
Nguyễn Xuân Tùng
10 tuổi
Chú chim cánh cụt
Nhà sáng tạo
Phạm Trung Hiếu
12 tuổi
Robot gập bụng
Nhà sáng tạo
Lê Thừa Dương Vũ
13 tuổi
Siêu bảo mật
Nhà sáng tạo
Lường Minh Trung
12 tuổi
Hộp kí gửi siêu an toàn
Đăng nhập để tham gia bình luận